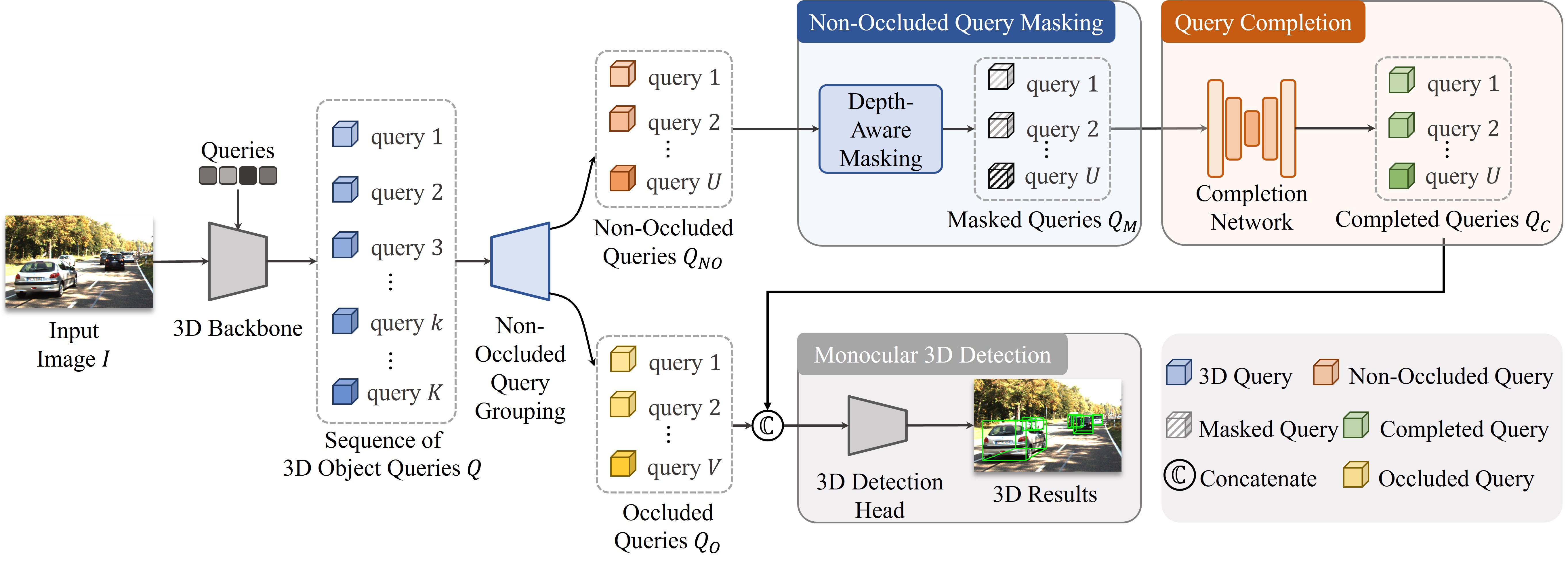
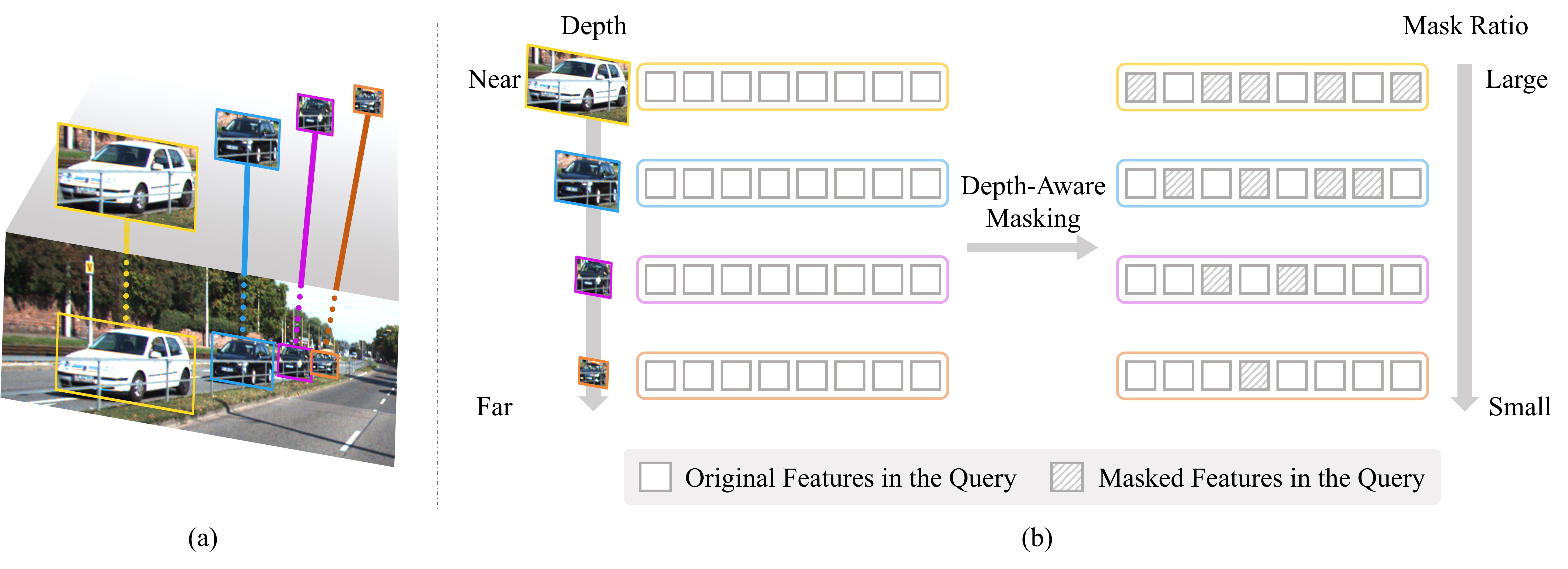
Monocular 3D object detection aims for precise 3D localization and identification of objects from a single-view image. Despite its recent progress, it often struggles while handling pervasive object occlusions that tend to complicate and degrade the prediction of object dimensions, depths, and orientations. We design MonoMAE, a monocular 3D detector inspired by Masked Autoencoders that addresses the object occlusion issue by masking and reconstructing objects in the feature space. MonoMAE consists of two novel designs. The first is depth-aware masking that selectively masks certain parts of non-occluded object queries in the feature space for simulating occluded object queries for network training. It masks non-occluded object queries by balancing the masked and preserved query portions adaptively according to the depth information. The second is lightweight query completion that works with the depth-aware masking to learn to reconstruct and complete the masked object queries. With the proposed feature-space occlusion and completion, MonoMAE learns enriched 3D representations that achieve superior monocular 3D detection performance qualitatively and quantitatively for both occluded and non-occluded objects. Additionally, MonoMAE learns generalizable representations that can work well in new domains.